
足のアーチは、現代ではホモ・サピエンス特有の構造であり、同じヒト科の動物であるゴリラやチンパンジーには無いものである。
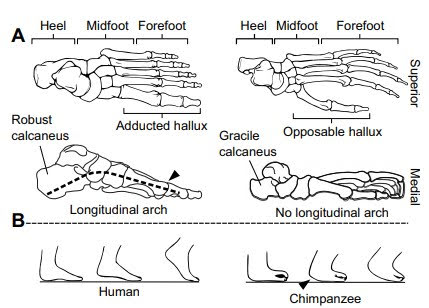
(1)の図のように、チンパンジーの足にはアーチ構造が無く、母趾は大きく外に開いている。
これは樹上生活で枝や蔓を足で掴む行動をしているからである。
我々ヒトとチンパンジーの先祖はおよそ700万年前に分岐したと言われ、ヒトはその後樹上生活を止めて地上へ下りてきたと言われている。
チンパンジーと分岐した後、現在までに発見されている最古のヒト科ヒト属の先祖が「サヘラントロプス」である。
サヘラントロプスはおよそ700〜600万年前に生息していたと考えられている。
年代は少し新しなって、およそ440万年前に生息していたとされる「アルディピテクス・ラミダス」の化石が発見された。
彼らの骨格のイメージはこのようになっていたと想像される。
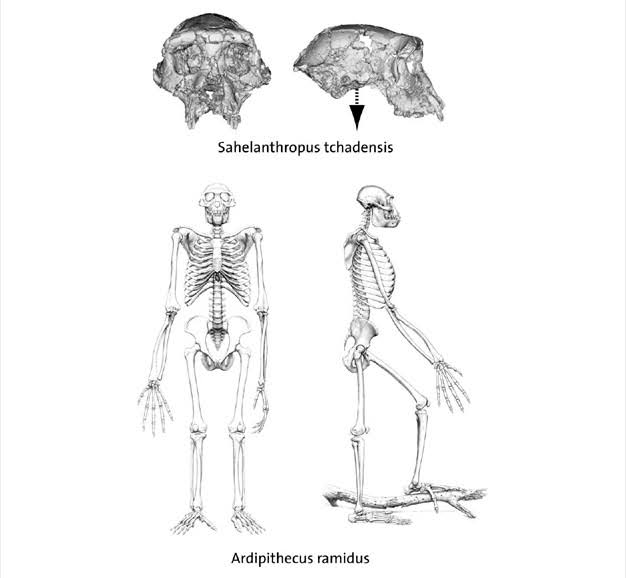
彼らは樹上生活と地上生活を行き来していたと想像され、地上では直立二足歩行をしていたようだ。
足の構造も現代のヒトとチンパンジーの中間くらいの構造をしており、母趾は外転していた。
タンザニアのラエトリの370万年前の地層から発見された有名な旧人類の足跡のイメージを次に示す。
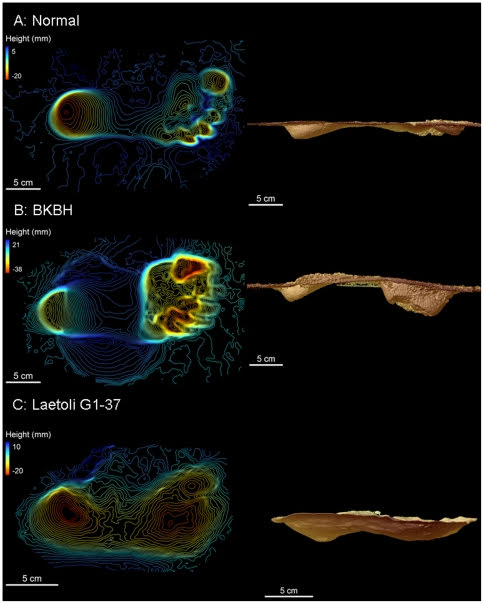
Aは現人類の足跡、Bは現人類が膝と股関節を曲げた歩容で付く足跡、Cがラエトリで発見された足跡である。
Bは直立二足歩行をまだ完全に獲得していない旧人類の歩容を模倣した足跡である。
CがBと異なり、Aと類似していることから、ラエトリの足跡は現人類に近い直立二足歩行を獲得した旧人類のものと考えられてきた。
どの種の人類かを断定することは出来ないが、アウストラロピテクス・アファレンシスの足跡であったと想像されている。
アウストラロピテクスの化石の分布は、人類が発祥したと言われる東アフリカを中心としたアフリカ大陸であったが、200万年前頃から現れたホモ属はヨーロッパやアジア大陸まで進出していった。
これはホモ属の歩行能力がアウストラロピテクスよりも進化していることを示してる。
そして、このホモ属はアウストラロピテクスが行っていなかった狩猟採集生活を始めたのだ。
つまり、ホモ属の足は直立二足で長い距離を走ることに適応したのだ。
外転した親趾は歩行や走行には邪魔でになるため、走ることを得意としている多くの哺乳類は親趾を退化させた。
ヒトの先祖は樹上生活に適応させるために、親趾の機能を進化させてきた。
現代のヒトの手と同じように、物を掴めるように進化させてきた。
樹上生活を止めたヒトの先祖は、陸上での効率的な直立二足歩行のために親趾を退化させるか進化させるしかなかったものと考える。
そして、ヒトの先祖は親趾を退化させるのではなく、内転位に変形させ、前方へ向けることで地面を親趾で押すという進化を選んだ。
歩行時に親趾を背屈させることで歩行の効率を上げていったとされる。
ホモ属だけが足のアーチを獲得し、ウィンドラス機構と呼ばれる直立二足歩行に効率化をもたらす機能を手に入れた。
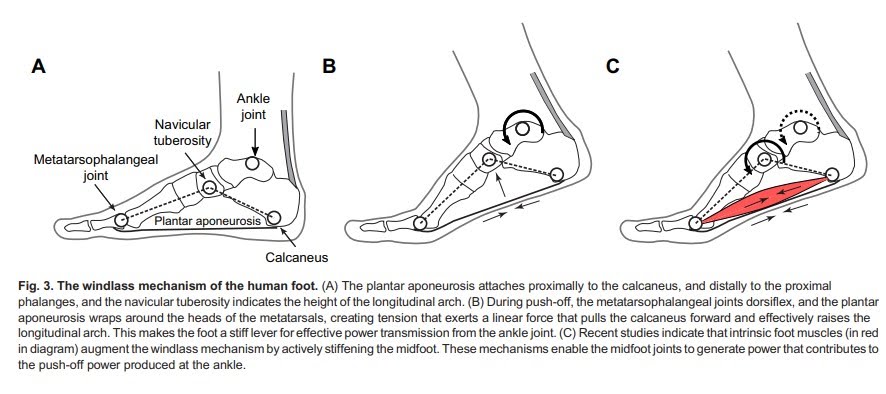
このウィンドラス機構によって、重心移動の効率化、着地衝撃の吸収力、そしてバネとしての反発力を得ることができた。
アウストラロピテクス以前の直立二足歩行はチンパンジーと類似した、股関節と膝関節を屈曲させた姿勢だったと想像されている。
ホモ属は足のアーチを獲得することによって、衝撃吸収と反発を股関節と膝に依存させる必要が無くなったのだ。
そして、ホモ属は膝と股関節の完全伸展を獲得し、その結果、腰椎は前湾し、脊柱のS字形を手に入れた。
歩行能力を進化させていったホモ属は、アフリカを出て全世界へと拡散していったのだ。
リーバーマンによると、ヒトは狩猟採集生活で走ることによって足のアーチを獲得したとされる。(5)
しかし、これはまだ仮説であり、走ることで足のアーチが進化したのか、足のアーチを獲得した後に走れるようになったのかは分かっていない。
私の仮説では、足のアーチを獲得した後に走れるようになったのではないかと考えている。
母趾を背屈させて母趾で地面を押すという環境で足の内側アーチは発達していく。
自然環境でのこの動作は、傾斜のある山を登るということである。
私の開発したダイナミックアーチというのは、その環境を模倣して平地で行うものである。
足のアーチの起源を探る旅で私を悩ませてきたのは、ヒトだけが足のアーチを持っているということである。
そのため、ヒトの赤ちゃんが立ち上がって歩くことによって、足のアーチを発達させるものと考えてきた。
系統発生を純粋に反復するとすれば、その理論は正しいはずである。
しかし、ヒトの個体発生の過程を見ると、赤ちゃんは這うときに母趾を背屈させて地面を押しているのだ。
生まれた時はサルのようなアーチの無い足だが、這うときに既にアーチ形成のための準備運動を始めているのだ。
これを模倣した運動がクラシックダイナミックアーチである。
個体発生は系統発生を繰り返すというのが反復説であるが、実際には時系列的に正確に反復するとは限らず、必要に応じて修正されているはずである。
リーバーマンの仮説を信じて、裸足で走る人々が一時的に増えた時代があった。
しかし、大多数が困難に直面して挫折していった現象があり、私は彼の仮説に疑問を抱いてきた。
靴が足の発育に弊害をもたらすことには同意するが、それよりも深刻なことは乳児期に靴下を履き、アーチ形成を阻害する悪習慣である。
レッスン8の足のアーチのワークでは、樹上生活を模倣した足ゆび歩きで足裏の筋肉を発達させるワークを最初に導入した。
その次に、母趾の背屈からの屈曲というダイナミックアーチで足のアーチを形成するワークを導入した。
ヒトの先祖が樹上生活で過ごし、そして大地に降りて直立二足歩行で歩きだしたという進化の歴史を再現したのである。
参考文献
(1)Elftman, H. and Manter, J. (1935a). Chimpanzee and human feet in bipedal walking. Am. J. Phys. Anthropol. 20, 69-79.
(2)Image of Sahelanthropus courtesy of Michel Brunet; drawing of Ardipithecus copyright © 2009 Jay Matternes.
(3)David A. Raichlen, Adam D. Gordon, William E. H. Harcourt-Smith, Adam D. Foster, Wm. Randall Haas, Jr PLoS One. 2010; 5(3): e9769.
(4)Hicks, J. H. (1954). The mechanics of the foot. II. The plantar aponeurosis. J. Anat.88, 25-30.
(5)Daniel Lieberman,The story of the human body:Evolution, Health, and Disease,Vintage,2014