
系統発生の歴史の中で、人類の先祖が四足歩行から二足歩行を獲得したことで、足の役割は大きく変化しました。
体重の支持を四点から二点に減少させることは、姿勢制御において不利になったと言えます。
人類の祖先は、いきなり四足から二足で立ったわけではなく、樹上でサルのような生活をしてから地上へ降りてきたと言われています。
樹上で、手で枝を掴みながら直立二足歩行と類似した移動様式を学習してきたとも言えます。
地上では、掴む枝もないわけですから、完全に両足二点だけで姿勢を制御しなければならなくなりました。
したがって、足の姿勢制御の機能は、数段階進化したものと考えられます。
踵を地面に着くことで、足を点ではなくて面として機能させることで姿勢制御能力を向上させていきました。
支持基底面を広げて姿勢制御を安定させているわけですが、もう一つ重要なことがあります。
それは、足裏のセンサーとしての機能が、直立二足歩行では必要不可欠なファクターなのです。
人間の足裏の面積は、基底面としてだけ直立二足支持の定性を得るには不十分なのです。
すなわち、小さい人間の足裏の面積で直立二足支持を制御するには、高度な足裏のセンサーが必要になるのです。
足裏のメカノレセプターという感覚器からは、地面の形状や傾斜、足部の関節の角度、そして圧力などの情報が中枢神経へ伝達されます。
こういった感覚器としての機能のレベルを数段上げないと、直立二足歩行は不可能なのです。
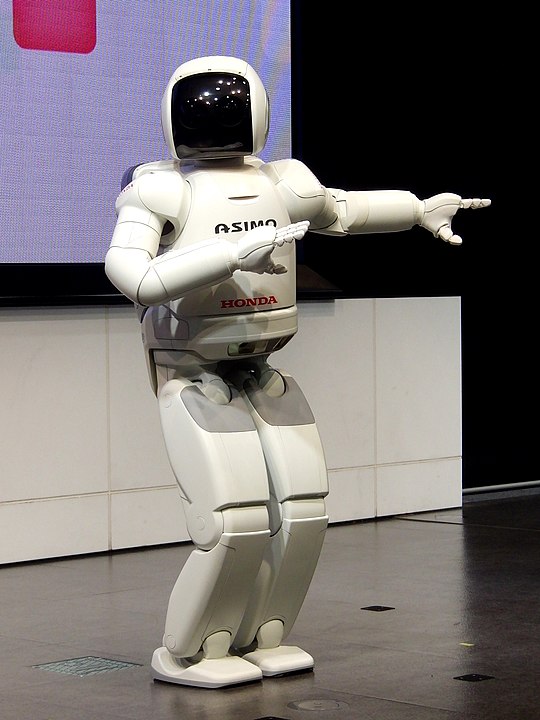
最新鋭の直立二足歩行ロボットATLASは、ロボットには困難だった足裏の二点支持だけでの歩行を可能にして世間を驚かせました。(3)
最先端のロボット技術は、人間に近い動きを可能にしましたが、我々は既にそれ以上の高度なセンサーを足に備えているのです。
では、人間の足に戻りましょう。
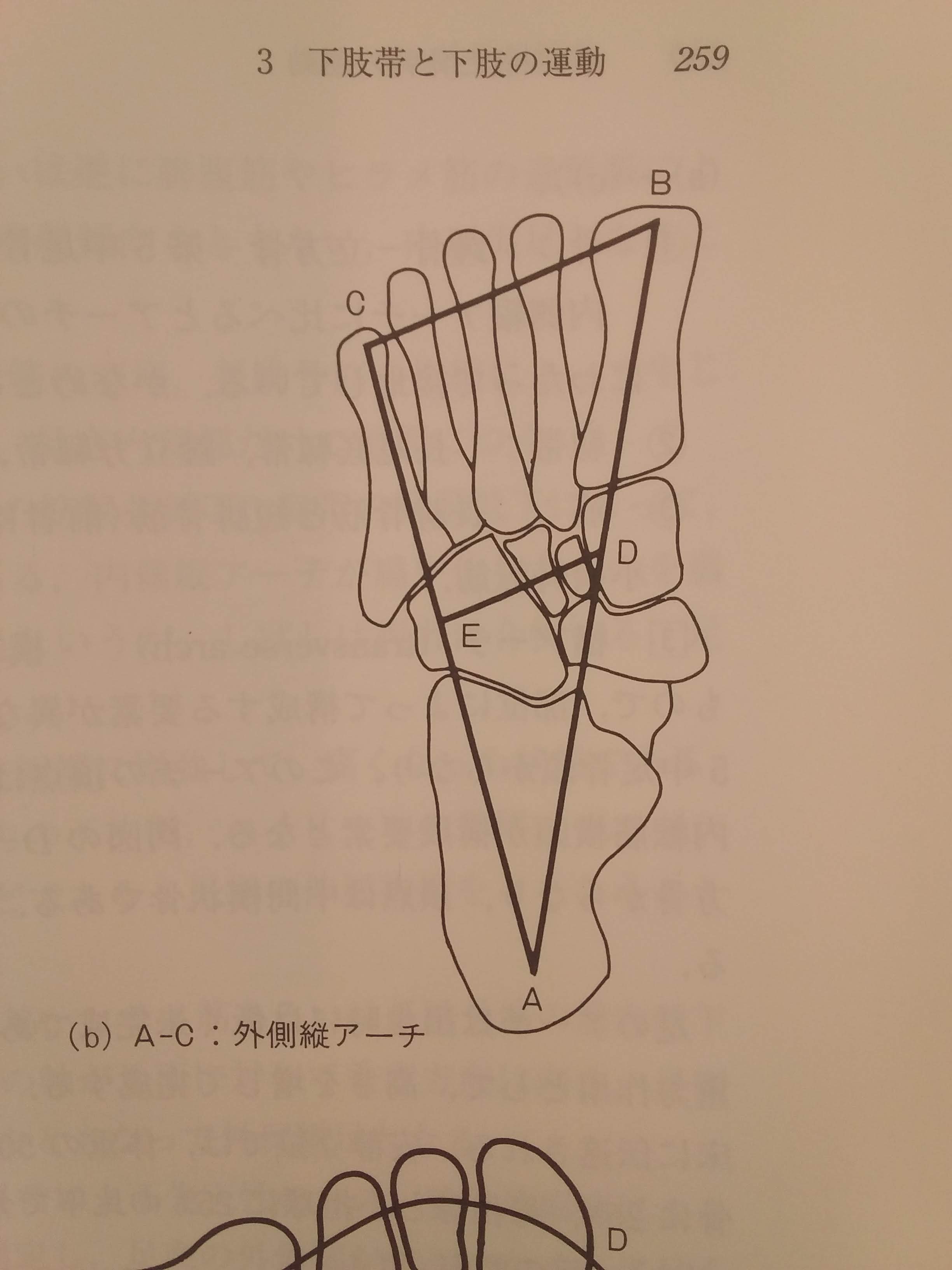
足には、26個の骨と沢山の足底筋群が存在します。(4)(5)
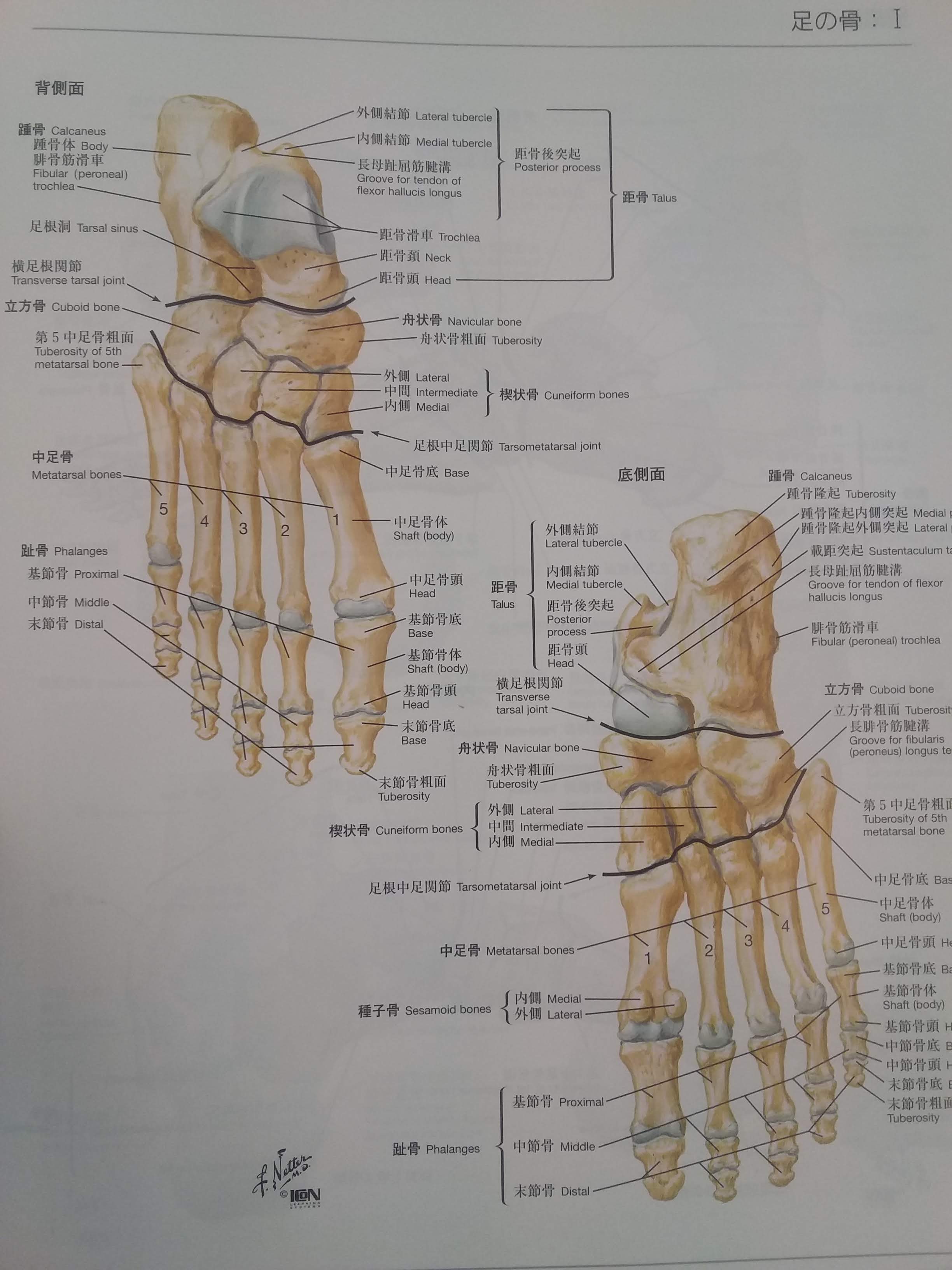
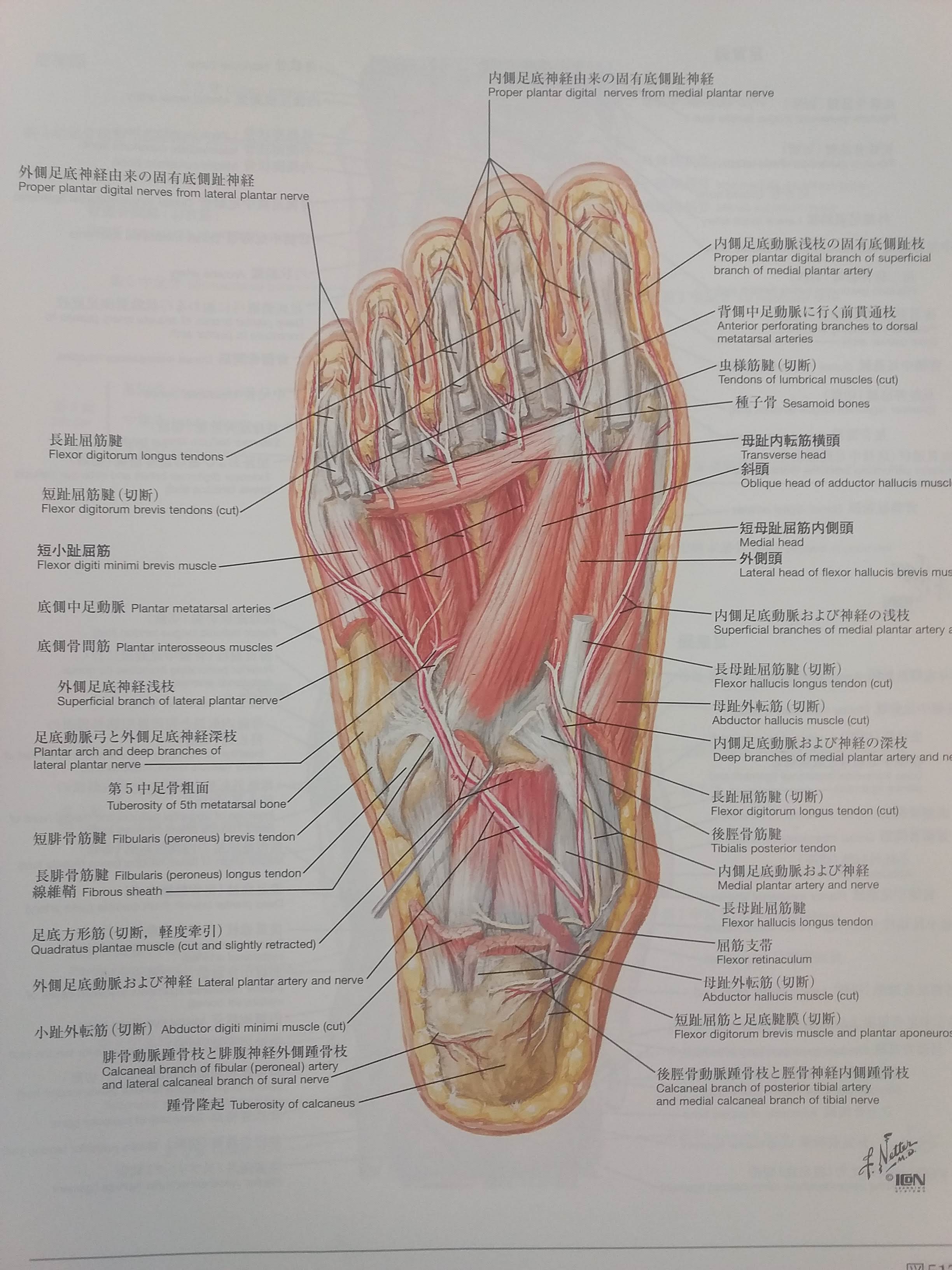
これらが全て正常に機能しないと、人間の姿勢制御は困難になります。
乳児期の足の発達不良だけではなく、靴を履く生活によって、足の機能は慢性的に制限された状態になっています。
足のセンサー機能の低下は、古いロボットのような動きでしか自身を制御できないこと意味します。
レッスン5の動画に、「裸足ウォーク」というメニューを入れたのは、制限された足の機能を回復させるという意図があります。
参考文献
(1) 中村隆一、斎藤宏、長崎浩(2003)「基礎運動学 第6版」医歯薬出版株式会社
(2) ダンスを踊るASIMO 2011年モデル。Hondaウエルカムプラザ青山にて。,https://ja.wikipedia.org/wiki/ASIMO#/media/File:ASIMO_2nd-gen_model_dancing.jpg2019年5月17日アクセス.
{kind=link}
(3) Atlas Walking over Partial Footholds,https://www.youtube.com/watch?v=_5PtxHsr038&feature=youtu.be2019年5月17日アクセス.
(4)、(5) Frank H.Netter、相磯貞和訳(2004)「ネッター解剖学アトラス(原書第3版)」株式会社南江堂